
Chocolate and confectionery plants need a practical way to remove nut fragments, cocoa dust, wafer crumbs, and other dry residues from low-clearance zones under production equipment. This article explains where autonomous dry cleaning robots fit, how they support allergen risk control, and what plant teams should verify before deployment.
May 20, 2026 | 12-minute read
A chocolate factory can look spotless from the main aisle and still have a stubborn hygiene problem under the line. Hazelnut chips collect below conveyors. Almond slivers slide under guards. Cocoa dust and wafer crumbs settle around legs, skirting, and cable trays. The hardest area is often the one operators see least: the narrow strip of floor under production equipment where people must bend, crawl, or stop the line to clean properly.
For factories that produce nut-containing and nut-free products in the same building, those fragments are not just housekeeping debris. They are part of the site’s allergen-control reality. A cleaning robot will not replace a validated sanitation program, allergen swabbing, or QA signoff. Used correctly, though, a low-profile dry cleaning robot can make one difficult task more consistent: collecting loose dry debris from under and around production equipment before it is tracked, crushed, blown, or carried into the wrong area.
That distinction matters. The best use case is not “robot cleans the factory.” It is more specific: “robot repeatedly removes visible nut debris from low-clearance floor zones so the sanitation team has fewer blind spots to manage.”
Why nut debris under chocolate lines is a food-safety issue
Tree nuts are among the major food allergens recognized by the U.S. Food and Drug Administration, and the FDA’s allergen-control framework requires manufacturers to address allergen cross-contact in manufacturing and packaging. The FDA defines allergen cross-contact as the unintentional incorporation of a food allergen into food. In practice, that means a hazelnut fragment left under a chocolate line can become relevant if it is crushed into dust, moved by foot traffic, carried by tools, or introduced into an area where it does not belong.
Chocolate factories also sit in a special sanitation category because many chocolate, nut, and confectionery processes are low-moisture. Codex guidance for low-moisture foods notes that product residues and dust can accumulate on conveyors, walls, equipment, and other surfaces, and that accumulation should be removed in a timely manner. It also recommends dry cleaning as the routine cleaning practice in areas requiring stringent hygiene control, with wet cleaning limited and carefully controlled because water can create new risks in dry environments.
The Food Standards Agency’s review of allergen cleaning literature points to another practical issue: validated cleaning can be more difficult in some environments, including chocolate and dry-blend production. Dry cleaning methods may be appropriate for low-water-activity foods, but the cleaning objective has to be clear. Is the team trying to remove visible nut pieces before they spread? Prepare an area for detailed sanitation? Support allergen validation between production runs? Each objective requires a different level of evidence.
For operations teams, the implication is simple. Loose nut debris on the floor should be treated as a controllable source of cross-contact risk. Removing it frequently and predictably gives QA and sanitation teams a better starting point.
The low-clearance problem is a workflow problem
Most factory cleaning plans handle main aisles well. They are open, visible, and easy to assign to manual sweepers, scrubbers, or ride-on equipment. The problem begins where the floor disappears under machinery.
Chocolate lines often include enrobing, cooling, molding, wrapping, and conveying equipment with limited clearance around the base. Nut debris does not land politely in the aisle. It falls straight down, bounces off guards, and settles near supports. Once fragments are under the machine, operators face a set of bad choices: use long-handled tools that miss corners, stop production for access, blow material out with compressed air, or ask staff to work in awkward postures around moving equipment.
Compressed air is especially sensitive in allergen-control discussions because it can move dust and small particles into other areas if it is not tightly controlled. The FSA review notes the common concern that methods capable of spreading material, including compressed air, should be avoided or used only as a last resort where necessary. A dry cleaning robot changes the workflow by collecting debris instead of scattering it.
This is where low-clearance robotic cleaning becomes useful. The robot does not need to solve every sanitation task. It needs to reduce the number of hidden debris pockets that build up between manual cleanings.
| Low-clearance cleaning challenge | Why it matters | What to evaluate in a robot |
| Nut fragments fall below conveyors and guards | Visible residue can become an allergen cross-contact source | Low body height, route access, dry debris pickup, bin handling |
| Staff must bend or crawl for routine sweeping | Awkward access increases safety and consistency risks | Autonomous routes, remote start/stop, manual takeover, obstacle sensing |
| Dust can spread when disturbed | Air movement may move allergen-containing particles | Sweeping/vacuum capture approach, dust control, tool segregation |
| Equipment legs and edges trap debris | Edge areas become recurring blind spots | Edge cleaning, route repeatability, close-to-boundary navigation |
| Sticky or oily residues can affect traction | Wheels and brushes may collect material | Maintenance routine, inspection schedule, residue suitability testing |
Table 1 – Low-clearance cleaning challenge matrix.
Why dry robotic sweeping fits chocolate environments
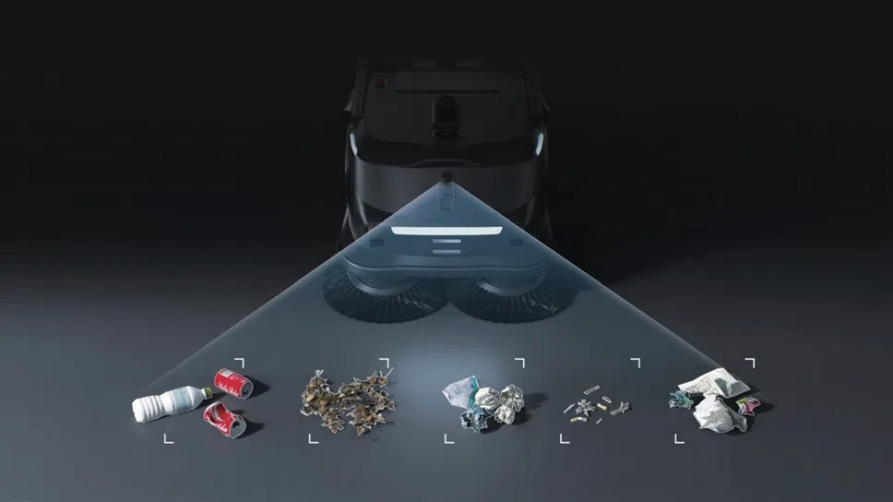
Figure 2 – Dry robotic sweeping is most useful when the debris type is visible, loose, and suitable for capture rather than wet scrubbing.
A chocolate factory does not usually want more water around low-moisture production zones. That is why a dry sweeping robot can be a better match than a scrubber for nut fragments and dry floor residues. The point is not to sanitize food-contact surfaces. It is to remove loose debris from the floor in a way that fits dry-area hygiene practice.
Codex guidance describes dry cleaning as removing product residues without applying water or aqueous solutions. It also recommends well-designed vacuum cleaners or similar tools for residue removal, with attention to tool maintenance, filter care, and dedicated use by area. A robotic sweeper follows the same operational logic when it is treated as a controlled cleaning tool rather than a general-purpose machine that wanders between zones.
In a chocolate plant, that usually means the robot should be assigned to a defined hygiene area, mapped to approved routes, emptied according to sanitation procedures, and maintained so the machine itself does not become a carrier of contamination. Brush, dustbin, wheel, and filter handling matter. So does deciding whether one robot can serve multiple areas or whether allergen-containing and allergen-sensitive zones require separate tools.
The strongest deployments start by classifying debris:
| Debris type | Robot fit | Notes for QA and sanitation |
| Hazelnut or almond fragments | Strong fit when pieces are loose and accessible | Validate pickup and check that fragments are not pushed into unreachable corners |
| Cocoa powder, wafer crumbs, sugar dust | Good fit when dry and not heavily compacted | Verify dust capture and filter maintenance routines |
| Sticky chocolate residue | Conditional fit | Test traction, brush loading, and cleaning frequency before broad deployment |
| Wet spills or cleaning water | Poor fit for dry sweeping | Use the plant’s approved wet or controlled wet cleaning procedure |
| Food-contact surfaces | Not the target task | Keep robot scope to floors unless a separate approved tool and validation plan exists |
Table 2 – Debris type matrix.
An anonymous European chocolate factory reference
In one confidential project, a leading European chocolate manufacturer used a low-profile cleaning robot to address hazelnut debris left under production-line equipment after processing. The manufacturer is not named publicly because the project is restricted for external disclosure, but the scenario is useful: nut fragments were accumulating in low, awkward areas where manual access was inefficient and uncomfortable.
The site needed the robot to do three practical jobs. First, it had to reach below low-clearance production structures where ordinary floor machines could not enter. Second, it had to collect dry nut pieces without spreading them across the line area. Third, it had to support safer work by reducing the amount of routine debris removal that required staff to lean or reach into tight spaces.
The deployment also surfaced a lesson that matters for any chocolate or nut-processing plant: sticky residues and mixed debris should be tested before assumptions are made. In the reference project, site-specific parameter tuning and wheel-maintenance routines were important because sugar, fat, and nut fragments can behave differently from ordinary dust. That should be written into the pilot plan. A robot that performs well on dry hazelnut chips in one area may need different brush settings, route speed, or cleaning frequency in another.
The real value was not a dramatic before-and-after claim. It was operational steadiness. The robot helped keep recurrent low-clearance debris from becoming a repeated manual blind spot, while the sanitation team retained responsibility for detailed cleaning, inspection, allergen verification, and any areas outside the robot’s access envelope.
Where PUDU MT1 fits the task

Figure 3 – PUDU MT1 is evaluated here for dry floor-debris removal, route repeatability, and low-profile access around production equipment.
PUDU MT1 is an AI-powered robotic sweeper designed for professional dry cleaning in large venues. For chocolate factories, the relevant points are not generic automation claims. They are physical fit, debris capture, route repeatability, and staff handoff.
Published specifications for PUDU MT1 list robot dimensions of 840 x 600 x 490 mm, a 35 L trash bin, 4 to 8 hours of runtime depending on cleaning level, less than 3 hours of charging time, and navigation based on VSLAM, markers, and Lidar SLAM. The same product data identifies AI trash recognition, AI spot cleaning, 75 cm narrow path clearance, multi-sense safety, and zero-gap edge cleaning.
Those capabilities map naturally to the chocolate-factory problem:
– The 490 mm height helps the robot enter some low-clearance areas where route width, safety rules, and equipment layout permit.
– Dry sweeping aligns better with low-moisture hygiene zones than routine wet scrubbing.
– AI trash recognition and spot cleaning can help the robot focus on visible debris rather than treating every square meter the same way.
– Narrow path clearance and edge cleaning matter around line legs, supports, walls, and structural columns.
– Long runtime and automated docking support frequent routes, which is important when debris is generated repeatedly during production.
The boundary is just as important as the fit. A robot cannot clean through fixed guards, remove residues from food-contact parts, validate allergen removal, or access every hidden void. It should be deployed as part of a controlled dry-cleaning workflow, not as a substitute for the site’s sanitation standard operating procedures.
A practical allergen-control workflow with robots
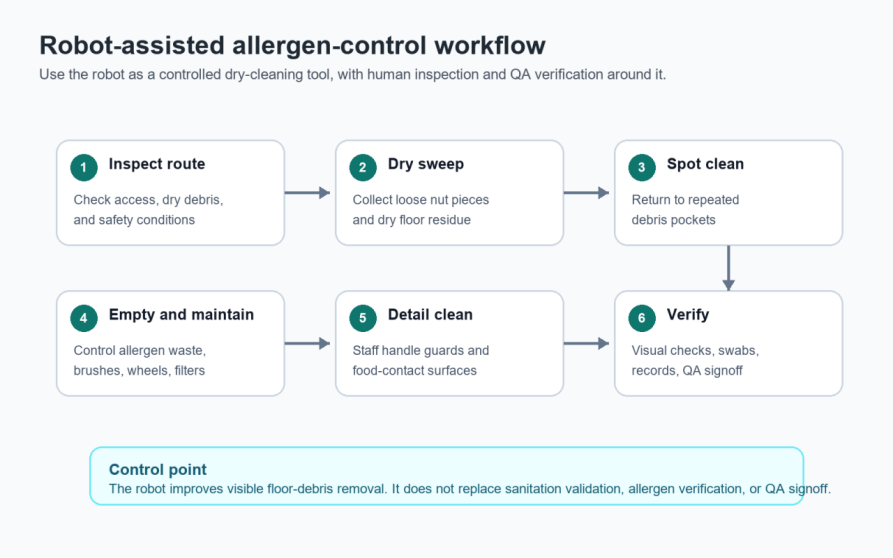
Figure 4 – The robot supports the dry-debris removal step while human inspection, maintenance, detailed sanitation, and QA verification remain part of the control system.
Cleaning robots work best when their job is written into the allergen-control process. A vague task such as “clean under the line” is hard to audit. A specific workflow can be mapped, measured, and improved.
| Workflow step | Robot contribution | Human / QA control |
| Pre-route inspection | Operator checks the route is clear and confirms debris type is suitable for dry sweeping | Confirm no wet spills, exposed product, or unsafe access conditions |
| Scheduled dry sweep | Robot collects loose nut fragments and dry residues under approved equipment zones | Monitor route completion and exceptions |
| Targeted spot clean | Robot returns to visible debris points or high-shed areas | Staff verify whether debris source needs process correction |
| Bin and tool handling | Robot returns to dock or handoff point for emptying and maintenance | Empty dustbin under allergen-control procedure; inspect brushes, wheels, and filters |
| Detailed sanitation | Robot reduces floor debris before manual detail cleaning | Staff handle food-contact surfaces, guarded areas, and final detail work |
| Verification | Robot route data supports cleaning records | QA uses visual checks, environmental monitoring, allergen testing, or swabbing as required |
Table 3 – Workflow step matrix.
This workflow also creates a cleaner conversation between operations and QA. Operations can ask whether the robot completed the planned route. QA can ask whether the cleaning objective was visible debris control, pre-clean preparation, or validated allergen changeover support. Procurement can ask whether the robot is being bought for the right job.
Deployment checklist for chocolate factories

Figure 5 – Route planning should be based on measured clearance, debris behavior, traffic rules, and allergen zoning.
Before approving a low-clearance cleaning robot, plant teams should walk the line with sanitation, EHS, engineering, and QA together. The best assessment is physical and specific.
| Assessment item | What to check | Why it matters |
| Clearance envelope | Measure height, width, turn radius, slopes, cable guards, drains, and machine legs | The robot can only clean where it can safely enter, turn, and exit |
| Debris behavior | Test hazelnut pieces, nut dust, wafer crumbs, cocoa powder, and sticky residues | Different debris affects sweeping, traction, and maintenance |
| Allergen zoning | Decide whether robot, brushes, bin, filters, and dock are dedicated by allergen zone | Prevents the tool from becoming a cross-contact vector |
| Route timing | Schedule during production, pauses, changeovers, or post-shift windows | Reduces conflict with people, forklifts, sanitation, and production flow |
| Safety controls | Define restricted areas, emergency stop access, signage, and operator responsibility | Keeps automation within the plant’s EHS system |
| Waste handling | Set bin-emptying method, PPE, disposal point, and cleaning of robot components | Allergen-containing debris needs controlled handling |
| Validation | Define visual standards, swab points, environmental monitoring, and acceptance criteria | Proves the workflow supports the food-safety plan |
| Exceptions | List areas the robot cannot clean and assign manual tasks | Prevents false confidence in uncleaned blind spots |
Table 4 – Assessment item matrix.
One useful pilot method is to choose one nut-containing line and divide it into three zones: open aisle, edge/leg zone, and under-equipment low-clearance zone. Run the robot on a fixed schedule, record what it collects, inspect exceptions, and compare manual cleaning time and residue patterns before changing the route. The goal is not to prove universal automation. The goal is to find exactly where the robot improves the site’s allergen-control routine.
What procurement should ask before buying
Procurement teams often compare robots by headline specifications. For chocolate factories, the better questions are more operational:
– Can the robot enter the actual under-line clearances, including turns and exit points?
– Does the sweeping system collect the plant’s real debris, including hazelnut pieces and cocoa dust, without spreading it?
– How are brushes, wheels, bins, and filters cleaned after collecting allergen-containing residue?
– Can the robot be dedicated to one allergen zone or clearly controlled when moved between areas?
– What route data, cleaning reports, or exception logs are available for QA review?
– What manual tasks remain, and are they written into the sanitation plan?
– How will the pilot define success: less visible debris, fewer under-line manual sweeps, improved audit readiness, or better changeover preparation?
These questions keep the purchase grounded. A factory does not need a robot that sounds impressive in a brochure. It needs a tool that behaves predictably around real chocolate equipment, real nut debris, and real sanitation rules.
FAQ
Can a cleaning robot make a chocolate factory allergen-safe by itself?
No. A cleaning robot can support allergen risk control by removing loose debris and improving routine coverage, but allergen risk control still depends on the site’s food-safety plan, validated cleaning procedures, inspection, training, and QA verification.
Is dry sweeping better than wet cleaning for chocolate production areas?
Often, yes, when the task is removing loose dry residues from low-moisture production zones. Codex guidance for low-moisture foods emphasizes dry cleaning as routine practice in stringent hygiene areas and recommends controlling water use carefully. Wet or controlled wet cleaning may still be needed in specific situations, but it should follow documented site procedures.
What low-clearance areas can PUDU MT1 clean?
PUDU MT1 has listed dimensions of 840 x 600 x 490 mm, so it can be evaluated for areas with enough height, width, turning space, and safe route access. The actual answer depends on the factory layout, equipment guards, cable trays, traffic rules, and sanitation zoning.
Can robots clean hazelnut fragments under production lines?
They can be a strong fit when the fragments are loose, dry, accessible, and within the robot’s sweeping capability. A pilot should test the site’s actual hazelnut pieces, cocoa dust, wafer crumbs, and any sticky residue before wider deployment.
What remains manual after robotic cleaning?
Manual work remains important for food-contact surfaces, areas behind fixed guards, disassembly cleaning, detailed inspection, allergen validation, and exceptions outside the robot’s access envelope. The robot’s job is to reduce recurring floor debris and improve consistency in difficult-access zones.
Conclusion: use the robot where the risk repeats
The strongest case for cleaning robots in chocolate factories is not novelty. It is repetition. Nut fragments fall in the same low-clearance zones shift after shift. Staff face the same awkward access problem. QA has to manage the same cross-contact concern. A dry cleaning robot can turn that recurring blind spot into a planned, recorded, and more consistent cleaning task.
For chocolate manufacturers handling hazelnuts, almonds, peanuts, or other allergen-containing ingredients, the next step is a line-level assessment. Map the low-clearance zones. Classify the debris. Define the allergen-control boundary. Then test whether a robot such as PUDU MT1 can collect the real residue under real production conditions.
The promise is not that automation makes allergen control automatic. The promise is narrower and more useful: fewer hidden nut fragments, less awkward routine access for staff, and a cleaner starting point for the sanitation and QA work that still has to be done well.
References & Further Reading
1. FDA, Food Allergies.
2. FDA, Frequently Asked Questions: Food Allergen Labeling Guidance for Industry.
3. Codex Alimentarius, Code of hygienic practice for low-moisture foods, CXC 75-2015.
4. Food Standards Agency, International review of the literature and guidance on food allergen cleaning.
5. Pudu Robotics, PUDU MT1.
6. Pudu Robotics, PUDU MT1 Series AI-native cleaning architecture and capabilities.